The project aims at discovering the extent of Cyber-physical attacks on UAVs. The simulator presented here was built as a part of this project.
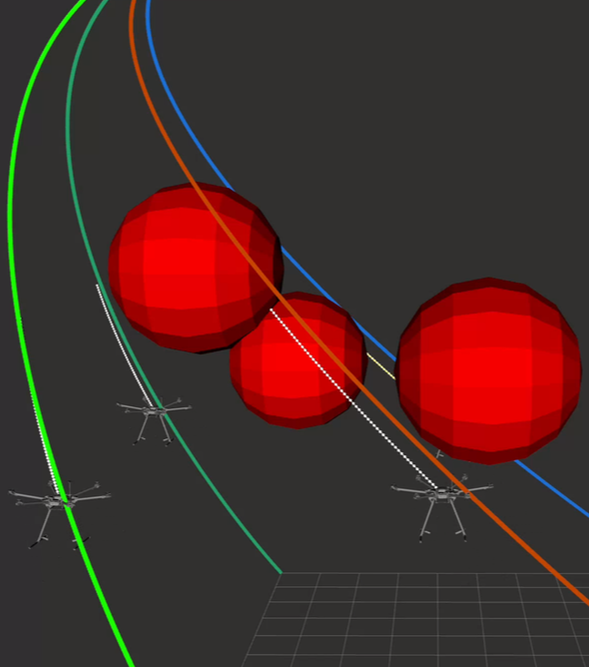
The simulator can be used to simulate multiple drones with a given start and goal pose. Each drone creates it's own ROS2 nodes for global trajectory, local trajectory, Remote ID and state information.
Each autonomous drone has LQR controller to track a trajectory generated by a planner and basic obstacle avoidance algorithm running separately. The simulator is particularly modular and other modules can be easily added.
GitHub Link:
https://github.com/patilunmesh/drone_simulator
|
|
